Satellite Navigation

Imagine navigating an unfamiliar city without GPS – no step-by-step directions, no estimated arrival times, and no traffic updates. Satellite navigation has become such a seamless part of our daily lives that we often take it for granted. But how does this technology actually work? What makes it so reliable? And why is it relevant in measurement technology? In this blog post, we’ll uncover the science behind satellite navigation and why it’s essential across industries and everyday life.
What is GNSS – the Global Navigation Satellite System?
As globalization gathered pace in the 20th century, it became increasingly important to know one’s exact location on the globe. When space travel became practical in the 1950s, an elegant and efficient solution emerged: satellite navigation.
The United States was the first to establish a global navigation system called Global Positioning System (GPS) and launched its initial satellites in 1978. However, hardly any country wants to be dependent on another nation. As a result, over the last decades, more and more countries developed their own satellite navigation system. Nowadays, three additional global systems are operational:
- Russia’s GLONASS first launched in 1982
- China’s BeiDou first launched in 2000
- European Union’s Galileo first launched in 2005
Although all of these four systems provide global coverage, they differ in key aspects. In the following, we highlight the main features (as of April 2025) of each:
GPS – Global Positioning System
- First launch: 1978
- No. of active*): 31
- Horizontal accuracy:
- Standard user: ± 4.9 m
- High-End navigation: ± 0.02 m
- Additional facts:
- Initially called Navstar GPS,
- Available for civilian use as of 1983
GLONASS – Global’naya Navigatsionnaya Sputnikovaya Sistema
- First launch: 1982
- No. of active satellites*): 23
- Horizontal accuracy: Standard user: ±2.8–7.3 m
- High-end navigation: ±0.3 m (intended)
- Additional facts: GLONASS-K2 is the latest version (launched in 2023)
BDS – BeiDou Navigation Satellite System
- First launch: 2000
- No. of active satellites*): ~44
- Horizontal accuracy:
- Standard user: ±3.6 m
- High-end navigation: ±0.1 m
- Additional facts: The current service is BeiDou-3
Galileo
- First launch: 2005
- No. of active satellites*): 27
- Horizontal accuracy:
- Standard user: ±1 m
- High-end navigation: ±0.2 m
- Additional facts: Designed primarily for civilian use
*) As of April 2025.
Notes:
- All satellite systems offer multiple services ranging from open services to encrypted high-accuracy services for specific use cases.
- Modern receivers are able to use multiple GNSS sources together, resulting in greatly improved coverage.
Beyond GNSS
In addition to these four GNSSs, multiple other satellite systems exist. However, these systems only provide regional coverage or simply act as an extension for the augmentation of a GNSS. Notable systems include:
- Regional Satellite Navigation Systems such as India’s NAVIC, and Japan’s QZSS.
- Global Satellite-Based Augmentation Systems (SBAS) such as OmniSTAR and StarFire to improve and correct the navigation system’s precision and reliability.
How does satellite navigation work?
All satellite navigation systems are based on a common principle: determining a receiver’s position using signals from multiple satellites orbiting Earth. These satellites continuously transmit radio signals within the L-band frequency range (1-2 GHz). Each signal contains the satellite’s current position and the precise time it was transmitted.
A receiver on Earth captures signals from at least four satellites to calculate its location accurately. Accurate timing is crucial, so all satellites and receivers rely on synchronized clocks. Here’s how the process works:
- Distance Calculation: The receiver measures the time difference between when the signal was transmitted and when it was received. Using this time difference, it calculates the distance to the satellite. This distance defines a spherical surface where the receiver could be located—every point on the sphere is equidistant from the satellite.
- Trilateration: By repeating this process with signals from two additional satellites, the receiver identifies two more spherical surfaces. The intersection of these three spheres results in two points. One pinpoints the receiver’s location in three dimensions: latitude, longitude, and altitude. Whereas the second one is usually not located on the Earth’s surface and can be easily eliminated by successive measurements.

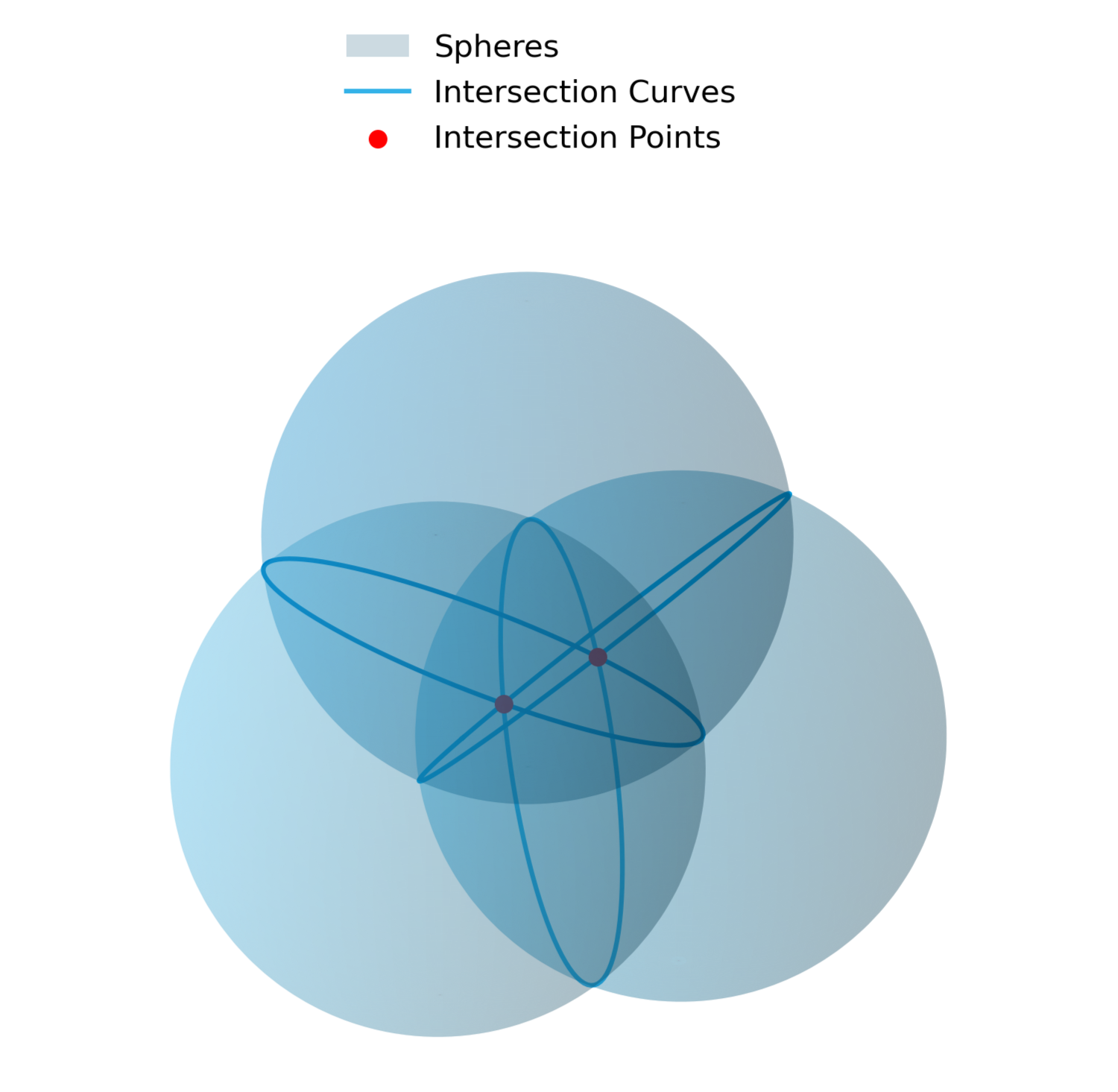
Fig. 1: Determination of spatial location using three satellites. Left: 3D visualization of intersecting spheres. Right: Simplified visualization of receiver location.
- Clock Correction: A fourth satellite is essential to correct timing errors caused by the receiver’s less-precise clock. Unlike satellites equipped with atomic clocks, receivers typically use less accurate clocks, leading to potential errors in distance calculations. For example, a timing error of just 1 microsecond can result in a position error of approximately 300 meters. The fourth satellite ensures precise timing by compensating for these discrepancies.
Fun fact:
Einstein’s well-known theory of relativity plays a significant role in satellite navigation. Without accounting for relativistic effects, GPS accuracy would degrade by about ~12 km per day!.
From a mathematical point of view
Determining a receiver’s position in spacetime requires solving navigation equations that involve four unknowns: the three spatial coordinates of the receiver x,y,z, corresponding to latitude, longitude, and altitude, and one time deviation parameter b (clock bias):

Where: ti … time of message reception at receiver, si … time of message send at satellite, c … speed of light, (xi, yi, zi) … components of satellite position. To solve for the unknowns, signals from at least four satellites are required, providing four equations to determine the receiver’s precise four-dimensional position in spacetime. In practice, more than four satellites are typically available, resulting in an over-determined system of equations. This system is solved using methods such as least squares or closed-form solutions, ensuring high accuracy in positioning.
How to use satellite navigation for time synchronization?
Although primarily designed for positioning, satellite navigation systems also serve as highly precise time references. Each GNSS satellite carries an atomic clock, making these systems ideal for global time synchronization. Each GNSS network operates on its own time scale:
GPS Time (GPST)1)
- Reference Epoch: January 6, 1980
- Time Source: U.S. Naval Observatory (USNO) atomic clocks
- Offset from UTC:
- GPST does not apply leap seconds and is 18 seconds ahead of UTC (as of 2025).
- Typical deviation adapted UTC: < 28 nanoseconds (ns)
- GPST = UTC + 18 s ± 28 ns
GLONASS Time (GLONASST)2)3)
- Reference Epoch: January 1, 1996
- Time Source: Russian GLONASS Central Synchronizer
- Offset from UTC:
- GLONASST applies leap seconds but remains 3 hours ahead of UTC (aligned with Moscow Standard Time, MSK).
- Typical deviation from MSK: < 120 ns
- GLONASST = UTC + 3 h ± 120 ns
Galileo System Time (GST)4)
- Reference Epoch: August 21, 1999
- Time Source: Galileo Control Centre – ESA atomic clocks
- Offset from UTC:
- GST does not include leap seconds and is 18 seconds ahead of UTC (as of 2025).
- Typical deviation from adapted UTC: < 30 ns
- GST = UTC + 18 s ± 30 ns
BeiDou Time (BDT)5)
- Reference Epoch: January 1, 2006
- Time Source: BeiDou Control Center
- Offset from UTC:
- BDT does not include leap seconds and is 4 seconds ahead of UTC (as of 2025).
- Typical deviation from adapted UTC: < 50 ns
- BDT = UTC + 4 s ± 50 ns
For a detailed comparison of GNSS time systems and their offsets, see Sesia et al., 2021.
Which GNSS solutions does DEWETRON offer?
For precise synchronization of measurement systems, minimizing the relative time delay between different measurement devices is of particular importance. Typically, cable-based synchronization is preferred due to its reliability and simplicity. However, direct cable connections are not always feasible—especially in large-scale applications like solar park monitoring, where areas can span several square kilometers. In such cases, satellite-based synchronization offers an ideal solution.

Fig. 2: DEWETRON’s hardware for receiving GNSS signals.
DEWETRON offers multiple options for satellite-based system synchronization. With hardware solutions such as the Option, TRION-TIMING modules, or TRION-VGPS module, we enable the reception of various GNSS signals. The choice of hardware determines synchronization accuracy, which remains better than ±240 ns. Beyond time synchronization, our systems also support satellite-based position localization, achieving accuracies down to just a few meters. This capability is particularly valuable for automotive applications such as Advanced Driver Assistance System (ADAS) testing, road testing for onboard systems, brake tests, and more. The table below provides an overview of our available GNSS options:
| GPS | Galileo | BeiDou | GLONASS | Sync accuracy | Position accuracy | |
| Chassis Controller | ✓ | x | ✓ | ✓ | ±100 ns | <2.5 m |
| TRION-TIMING | ✓ | ✓ | ✓ | ✓ | ±100 ns | <1.5 m |
| TRION-VGPS | ✓ | x | x | ✓ | ±240 ns | <1.5 m |
Tab. 1: Comparison of DEWETRON’s hardware supporting GNSS signals.
Note: The selection of the correct antenna is also decisive, as not all antennas are capable of receiving every GNSS signal.
Together with DEWETRON’s OXYGEN software, these GNSS solutions unlock various possibilities. The Bird’s Eye plugin, for example, provides real-time visualization of ADAS test environments and uses IMU data to dynamically update the position and movement of objects. This allows the generation of realistic contours for precise distance calculations. Another useful tool is the GPS-Plot instrument with its color trail feature, which enables GPS trails to change color based on the amplitude of a specified channel (e.g., velocity, acceleration, altitude, …).
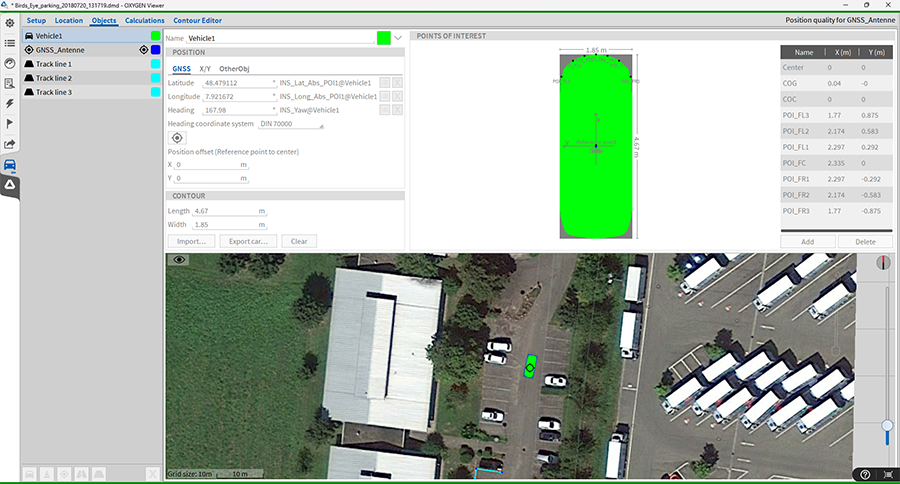
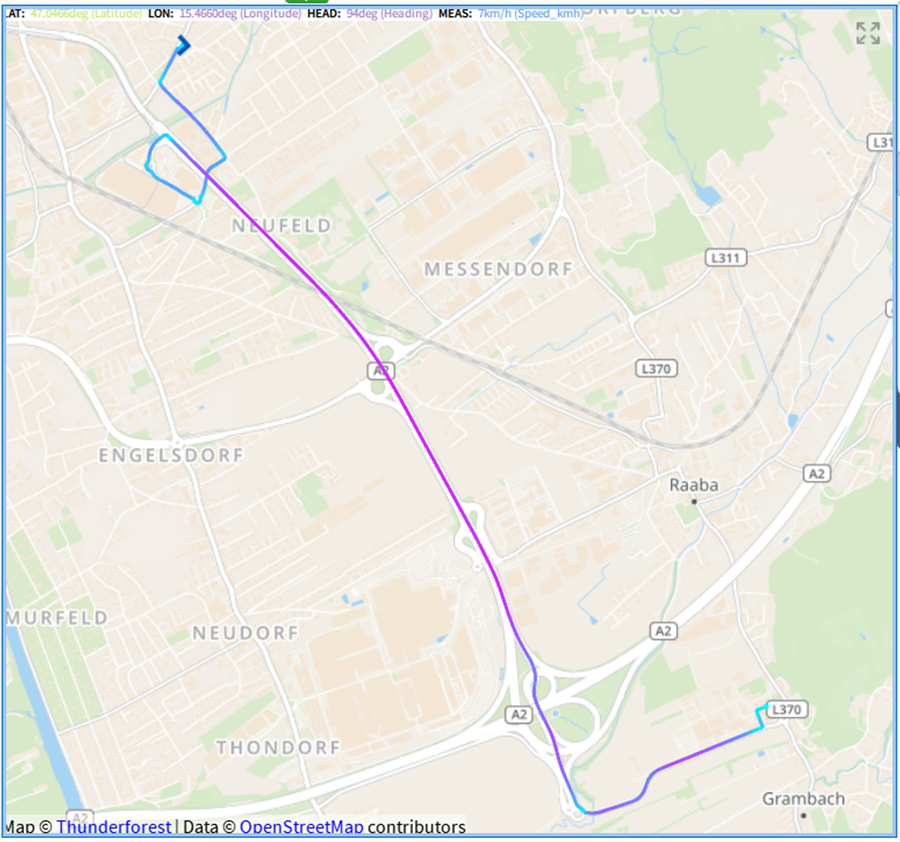
Fig. 3: OXYGEN’s Bird Eye Plugin (left) and GPS-Plot instrument (right)
DEWETRON’s GNSS solutions combine high-precision synchronization, accurate positioning, and advanced visualization tools to meet the demands of modern measurement applications. Whether for automotive testing or large-scale system monitoring, our technology ensures reliable and efficient performance.
To make a long story short
Global Navigation Satellite Systems (GNSS) like GPS, GLONASS, BeiDou, and Galileo have revolutionized how we determine location and time across the globe. While primarily used for navigation, these systems also play a vital role in precise time synchronization — an essential requirement for many industrial and scientific applications. Each GNSS operates on its own time scale, with high-precision atomic clocks ensuring synchronization accuracy down to the nanosecond. Modern receivers can combine signals from multiple systems, greatly improving accuracy and coverage.
DEWETRON implements GNSS technology to provide highly accurate time and position synchronization for its data acquisition systems. With solutions like the Chassis Controller, TRION-TIMING, and TRION-VGPS modules, you can achieve synchronization better than ±240 ns and positioning accuracy of just a few meters. Combined with DEWETRON’s OXYGEN software, these systems are perfectly suited for demanding applications such as precise localization and synchronous data acquisition across large areas.
Sources
- http://www.gps.gov/technical/icwg/IS-GPS-200G.pdf
- https://ieeexplore.ieee.org/document/6928996
- https://www.ursi.org/proceedings/procGA14/papers/ursi_paper1409.pdf
- https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo-OS-SDD_v1.3.pdf
- http://en.beidou.gov.cn/SYSTEMS/ICD/