EtherCATで高速測定を行うには?
「Processing on the fly」という言葉は一見バズワードのように聞こえるかもしれませんが、リアルタイムオートメーションの世界では、EtherCATならではの特長的な機能です。
EtherCATは巧みな設計により、最小限の遅延でデータを処理できるため、高速・高精度が求められるアプリケーションに適しています。
本記事では、EtherCATとは何か、どのように動作するのか、そしてどのような用途で使用されているのかを詳しく見ていきます。
EtherCATとは?
EtherCATは、Ethernet for Control Automation Technologyの略で、オートメーションおよび制御システムにおける高性能なリアルタイム通信のために開発された、Ethernetベースのフィールドバスシステムです。
その名称が示すとおり、EtherCATは、最新の産業用アプリケーションに求められる厳格なタイミング要件や同期要件を満たすよう最適化された産業用Ethernetプロトコルです。
EtherCATはBeckhoff Automation によって開発され、2003年に初めて発表されました。その後、2007年に正式に標準化されています。本プロトコルは、IEC 61158 – Industrial communication networks – Fieldbus specificationsで標準化されており、さらに IEC 61784 – Industrial networks – Profilesで定義されています。
従来のEthernetプロトコルでは、一般的にレイテンシや通信ジッタが課題となります。
一方、EtherCATはリアルタイム性能を前提として設計されており、独自の動作原理によって遅延を最小限に抑え、通信ジッタを低減します。
そのため、時間制約の厳しい産業用通信に特に適しています。
EtherCATはどのように動作するのか?
従来のEthernet通信では、ストップアンドストア方式が使用されます。
ネットワーク内の各デバイスは、データパケット全体を受信し、そのデータが自分宛てかどうかを確認したうえで、応答または転送を行います。
このように各デバイスで順番に処理が行われるため、チェーン内の各デバイスでレイテンシが発生します。
これに対して、EtherCATではprocessing on the fly方式を採用しています。
各ノードで停止するのではなく、1つのEtherCATフレームがすべてのデバイスを順番に通過します。
フレームが通過する際、各デバイスは自身に関連するデータを読み取り、新しい情報をフレームへ直接書き込みます。
この処理は、フレームを停止させることなく行われるため、ネットワーク内をフレームが移動し続け、レイテンシを最小限に抑えることができます。
このようにデータ通信方式には大きな違いがありますが、EtherCATは標準的なEthernetケーブルを使用できます。
そのため、既存インフラへの導入も容易です。
You are currently viewing a placeholder content from Default. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More Information図1:EtherCATのフレーム処理イメージ(出典:Wikipedia/Timmy Broling)
簡単に言えば、Ethernetは配送トラックが各家に停車して荷物を届けたり回収したりするようなものです。
一方、EtherCATはすべての家を通過するベルトコンベアのようなものです。各人はベルトを止めることなく、自分の荷物を取り出したり追加したりできます。
EtherCATのメリット
EtherCATは、最新の産業用オートメーションや計測アプリケーションに適した、強力なメリットを備えています。
そのアーキテクチャは高速で信頼性が高いだけでなく、拡張性とコスト効率にも優れています。
高い性能
EtherCATは、高速性と高いタイミング精度を備えており、要求の厳しいリアルタイムアプリケーションに適しています。
- データ更新時間、またはサイクルタイムは100 µs未満
- 通信ジッタは1 µs未満と非常に低く、高精度な同期が可能
柔軟なネットワークトポロジ
多くの産業用プロトコルとは異なり、EtherCATはネットワーク構成において高い柔軟性を備えています。
- ライン、ツリー、リング、スターなど、複数のトポロジに対応
- 外部スイッチやハブが不要で、ハードウェアコストを低減
- 高い拡張性を備え、1つのネットワークに最大65,535台のデバイスを接続可能
堅牢で信頼性の高い機能
EtherCATには、信頼性の高い安全な通信を実現するための仕組みが組み込まれています。
- 統合診断機能により、ケーブル断線、接続問題、デバイス故障を迅速に検出
- データ伝送中のビットエラー検出により、フォルトトレランスとシステム安定性を向上
コスト効率の高い実装
EtherCATのもう一つのメリットは、標準的なEthernetケーブルとコントローラを使用しながら、高性能を実現できる点です。
専用ハードウェアを必要とせず、リアルタイム産業用通信をコスト効率よく実装できます。
EtherCATはどこで使用されているのか?
EtherCATは、リアルタイム性能、柔軟性、精度に優れているため、さまざまな産業分野で使用されています。
特に、決定論的なタイミングと厳密な同期が求められるアプリケーションで大きな価値を発揮します。
産業用オートメーション
EtherCATは、モータ、センサ、コントローラのシームレスな連携を可能にし、高速組立ラインやコンベアシステムに適しています。
テストベンチ
テストベンチ環境では、複数のセンサからの高速データをリアルタイムに同期取得できます。
これは、自動車、航空宇宙、産業分野の開発試験環境において、正確な試験を実施するために不可欠です。
製造・産業
半導体製造、金属加工、電子機器製造など、さまざまな製造プロセスでは、精密なモーション制御とタイミングが重要です。
EtherCATは、複雑な機械動作の正確な同期を支援します。
再生可能エネルギー&グリーンエネルギー
EtherCATは、風力タービンや太陽光発電所などの再生可能エネルギー分野でも使用が広がっています。
分散システムの監視、制御、診断を、大規模な距離にわたって同期して行うために活用されています。
ロボティクス
ロボティクス分野では、複数のサーボドライブ、センサ、コントローラ間のリアルタイム通信を実現するうえで、EtherCATが中心的な役割を果たします。
高速かつ決定論的な応答により、動的または高速な環境においても、ロボットの高精度で安全な動作を可能にします。
このように、EtherCATはさまざまな業界の多様なシステムに実装できます。
以下の例は、精密医療ロボットから高性能な産業用試験まで、実環境におけるEtherCATの汎用性と信頼性を示しています。
- 脊椎手術ロボット制御システム
- 自動車のエンドオブライン試験装置
- 半導体ウェハ搬送ロボット
- 高速包装機
- 印刷機制御システム
- 風力タービン用テストベンチ
- フライトシミュレータ制御システム
- 研究用DAQシステム
- 電力網監視
…
実際の導入事例に関する詳細は、EtherCAT公式Webサイトをご参照ください。100件以上のアプリケーション例が掲載されています。
DEWETRONデバイスでEtherCATを使用するには?
DEWETRONはEtherCAT Technology Group(ETG)の公式メンバー (ETG)として、高度な計測アプリケーション向けに、堅牢で柔軟なEtherCAT統合オプションを提供しています。
専用に設計されたソリューションである TRION-EtherCAT-1-SLAVEにより、DEWETRONの計測デバイスを既存のEtherCATベースのオートメーション環境や試験環境へシームレスに統合できます。

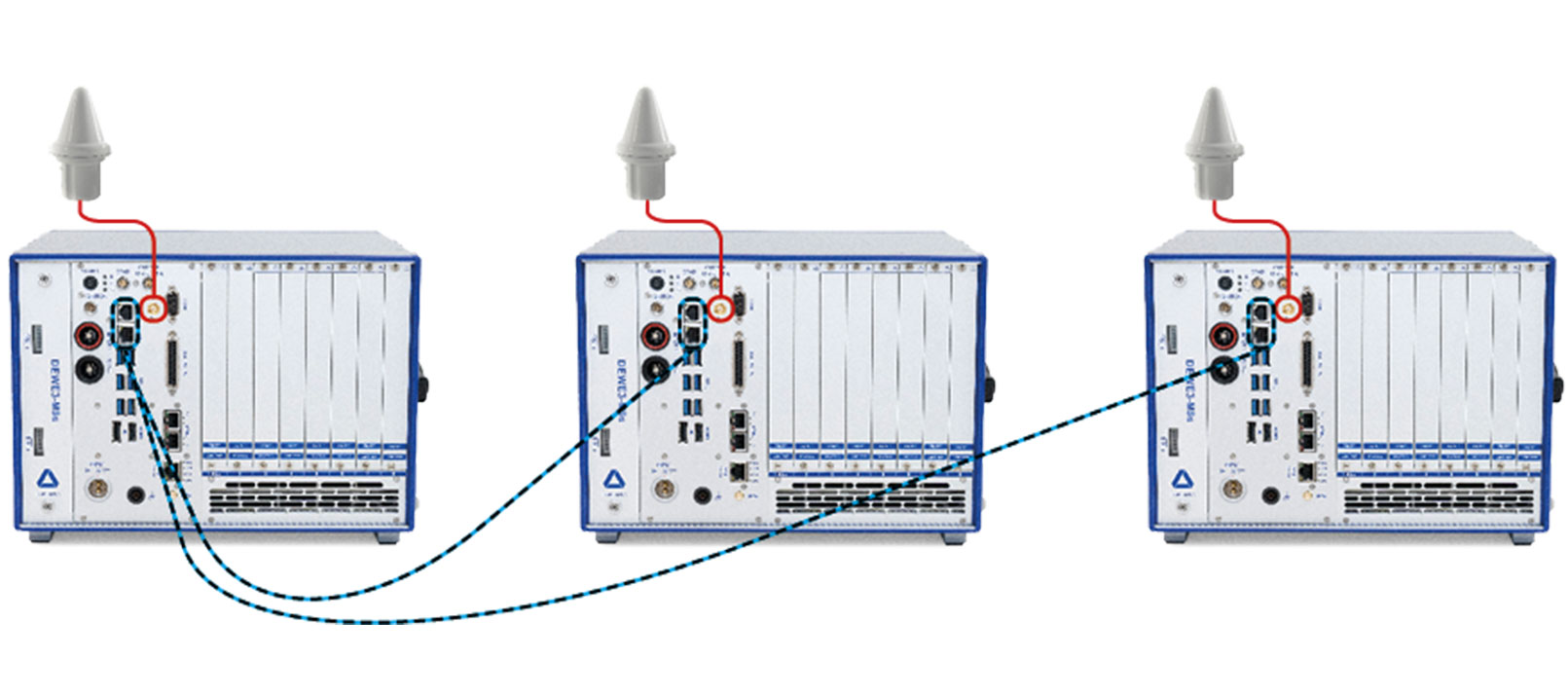
図2:DEWETRONのモジュール式TRION-EtherCAT-1-SLAVEソリューション
TRION-EtherCAT-1-SLAVEモジュールを使用することで、DEWETRONデバイスはEtherCATスレーブとして動作し、高精度な測定データをホストシステムへリアルタイムに提供できます。
各EtherCAT対応DEWETRONデバイスには、入力コネクタと出力コネクタが1つずつ搭載されており、デイジーチェーン型のEtherCATネットワークの一部として構成できます。
DEWETRONのEtherCAT実装における主な特長は以下のとおりです。
- 出力チャネル構成に基づくESIファイルの自動生成
- EtherCAT経由で最大100測定チャネルを転送
- 出力測定データの更新レートは最大1000 Hz
- 標準I/O遅延は約200 ms
- ポスト同期を可能にする絶対タイムスタンプ転送に対応
EtherCATスレーブモジュールの設定は、ハードウェアの接続・構成と、OXYGEN計測ソフトウェア上での設定の両方を含みます。 手順の詳細については、必要なダウンロード、システム要件、セットアップ手順を記載したEtherCAT Slave Configuration Manualをご参照ください。
まとめ
EtherCATは、Beckhoff Automationによって開発された高性能なフィールドバスシステムです。
独自のprocessing on the fly方式により、100 µs未満のサイクルタイムと1 µs未満の通信ジッタを実現します。
これにより、ネットワーク全体で高精度なリアルタイム通信が可能となり、EtherCATはオートメーションシステム、試験・計測環境、その他多くの産業用アプリケーションに適したプロトコルとなっています。
DEWETRONのTRION-EtherCAT-1-SLAVEモジュールを使用することで、既存のEtherCATベースのインフラへDEWETRON計測デバイスをシームレスに統合できます。