Satellitennavigation

Stellen Sie sich vor, Sie müssten sich in einer fremden Stadt ohne GPS zurechtfinden – ohne Schritt-für-Schritt-Anweisungen, ohne geschätzte Ankunftszeiten und ohne aktuelle Verkehrsmeldungen. Die Satellitennavigation ist zu einem so selbstverständlichen Teil unseres täglichen Lebens geworden. Aber wie funktioniert diese Technologie eigentlich? Was macht sie so zuverlässig? Und warum ist sie auch in der Messtechnik so wichtig? In diesem Blogbeitrag erfahren Sie mehr über die Wissenschaft hinter der Satellitennavigation und warum sie in vielen Branchen und im Alltag unverzichtbar ist.
Was ist GNSS – das Globale Navigationssatellitensystem?
Mit der zunehmenden Globalisierung im 20. Jahrhundert wurde es immer wichtiger, den eigenen Standort auf dem Globus genau zu kennen. Als die Raumfahrt in den 1950er Jahren Realität wurde, bot sich eine elegante und effiziente Lösung an: die Satellitennavigation.
Die Vereinigten Staaten waren die ersten, die ein globales Navigationssystem namens Global Positioning System (GPS) einrichteten und 1978 die ersten Satelliten starteten. Doch kaum ein Land möchte von einer anderen Nation abhängig sein. Daher haben in den letzten Jahrzehnten immer mehr Länder ihr eigenes Satellitennavigationssystem entwickelt. Heutzutage sind drei weitere globale Systeme in Betrieb:
- Russlands GLONASS – 1982 in Betrieb genommen
- Chinas BeiDou – 2000 in Betrieb genommen
- Galileo der Europäischen Union – 2005 in Betrieb genommen
Obwohl alle diese vier Systeme eine globale Abdeckung bieten, unterscheiden sie sich in wichtigen Aspekten. Im Folgenden werden die wichtigsten Merkmale (Stand: Januar 2025) der einzelnen Systeme erläutert:
GPS – Global Positioning System
- Erster Start: 1978
- Anzahl der aktiven Satelliten*): 31
- Horizontale Genauigkeit:
- Standardnutzer: ±4,9 m
- High-End-Navigation: ± 0,02 m
- Wissenswertes:
- Ursprünglich Navstar GPS
- Seit 1983 für die zivile Nutzung verfügbar
GLONASS – Global’naya Navigatsionnaya Sputnikovaya Sistema
- Erster Start: 1982
- Anzahl der aktiven Satelliten*): 23
- Horizontale Genauigkeit:
- Standardnutzer: ±2.8–7.3 m
- High-End-Navigation: ±0.3 m (intended)
- Wissenswertes: GLONASS-K2 ist die modernste Version
BDS – BeiDou Navigation Satellite System
- Erster Start: 2000
- Anzahl der aktiven Satelliten*): ~44
- Horizontale Genauigkeit:
- Standardnutzer: ±3,6 m
- High-End-Navigation: ±0,1 m
- Wissenswertes: Aktuell ist BeiDou-3 im Betrieb
Galileo
- Erster Start: 2005
- Anzahl der aktiven Satelliten*): 27
- Horizontale Genauigkeit:
- Standardnutzer: ±1 m
- High-End-Navigation: ±0,2 m
- Wissenswertes: Hauptsächlich für die zivile Nutzung gedacht
*) Stand April 2025
Anmerkungen:
- Alle Satellitensysteme bieten mehrere Dienste an – von frei zugänglichen Dienstleistungen bis hin zu verschlüsselten Hochpräzisionsdiensten.
- Moderne Empfänger sind in der Lage, mehrere GNSS-Quellen gemeinsam zu nutzen, was zu einer deutlich verbesserten Abdeckung führt.
Beyond GNSS
Neben diesen vier GNSS gibt es zahlreiche weitere Satellitensysteme. Allerdings bieten diese Systeme nur eine regionale Abdeckung oder dienen lediglich als Ergänzung zu einem GNSS. Zu den nennenswerten Systemen gehören:
- Regionale Satellitennavigationssysteme wie das indische NAVIC und das japanische QZSS.
- Globale satellitengestützte Ergänzungssysteme (SBAS) wie OmniSTAR und StarFire zur Verbesserung der Genauigkeit und Zuverlässigkeit von Navigationssystemen.
Wie funktioniert Satellitennavigation?
Alle Satellitennavigationssysteme beruhen auf einem gemeinsamen Prinzip: die Positionsbestimmung eines Empfängers anhand Signalen mehrerer Satelliten, die die Erde umkreisen. Diese Satelliten senden kontinuierlich Funksignale im L-Band-Frequenzbereich (1-2 GHz) aus. Jedes Signal enthält die aktuelle Position des Satelliten und den genauen Zeitpunkt, zu dem es gesendet wurde.
Ein Empfänger auf der Erde erfasst die Signale von mindestens vier Satelliten, um seine Position genau zu berechnen. Eine genaue Zeitangabe ist von entscheidender Bedeutung, weshalb alle Satelliten und Empfänger auf synchronisierte Uhren angewiesen sind. Und so funktioniert der Prozess:
- Entfernungsberechnung: Der Empfänger misst die Zeitdifferenz zwischen dem Zeitpunkt, an dem das Signal gesendet wurde, und dem Zeitpunkt, an dem es empfangen wurde. Anhand dieser Zeitdifferenz berechnet er die Entfernung zum Satelliten. Diese Entfernung definiert eine kugelförmige Oberfläche, auf der sich der Empfänger befindet – jeder Punkt auf der Kugel ist gleich weit vom Satelliten entfernt.
- Trilateration: Durch Wiederholung dieses Prozesses mit den Signalen von zwei weiteren Satelliten identifiziert der Empfänger zwei weitere Kugelflächen. Der Schnittpunkt dieser drei Kugeln ergibt zwei Punkte. Der eine gibt den Standort des Empfängers in drei Dimensionen an: Breitengrad, Längengrad und Höhe. Der zweite hingegen befindet sich in der Regel nicht auf der Erdoberfläche und kann durch nachfolgende Messungen leicht eliminiert werden.

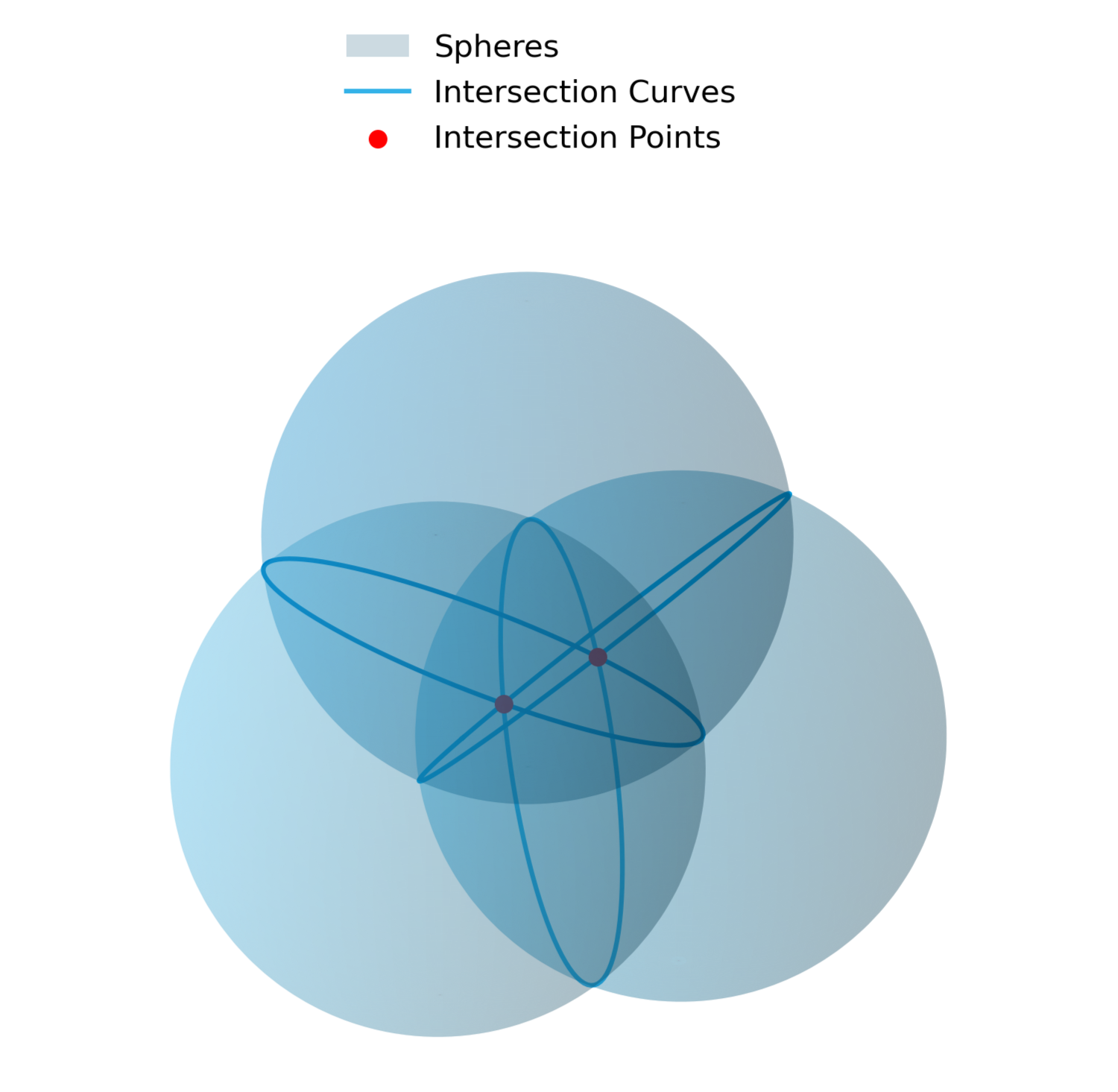
Abb. 1: Bestimmung der räumlichen Position mit drei Satelliten. Links: 3D-Visualisierung der sich überschneidenden Kugeln. Rechts: Vereinfachte Visualisierung der Empfängerposition.
- Zeitkorrektur: Ein vierter Satellit ist notwendig, um Zeitfehler zu korrigieren, die durch die ungenauere Uhr des Empfängers verursacht werden. Im Gegensatz zu Satelliten, welche heutzutage mit Atomuhren ausgestattet sind, verwenden Empfänger in der Regel weniger genaue Uhren, was zu möglichen Fehlern bei der Entfernungsberechnung führt. So kann beispielsweise ein Zeitfehler von nur 1 Mikrosekunde zu einem Positionsfehler von etwa 300 Metern führen. Der vierte Satellit sorgt für eine präzise Zeitmessung, indem er diese Diskrepanzen ausgleicht.
Wissenswertes:
Einsteins bekannte Relativitätstheorie spielt eine wichtige Rolle bei der Satellitennavigation. Ohne Berücksichtigung der relativistischen Effekte würde sich die GPS-Genauigkeit um etwa 12 km pro Tag verschlechtern!
Aus mathematischer Sicht
Die Bestimmung der Position eines Empfängers in der Raumzeit erfordert die Lösung von vier Navigationsgleichungen, welche vier Unbekannte beinhalten: die drei Raumkoordinaten des Empfängers x,y,z, die der geografischen Breite, Länge und Höhe entsprechen, und einen Zeitabweichungsparameter b (Clock Bias):

Wobei: ti … Zeit des Signalempfangs beim Empfänger, si … Absendezeitpunk des Signals beim Satelliten, c … Lichtgeschwindigkeit, (xi, yi, zi) … Komponenten der Satellitenposition. Um die unbekannten parameter zu ermitteln, werden Signale von mindestens vier Satelliten benötigt, sodass sich vier Gleichungen zur Bestimmung der genauen vierdimensionalen Position des Empfängers in der Raumzeit ergeben. In der Praxis sind in der Regel mehr als vier Satelliten verfügbar, was zu einem überbestimmten Gleichungssystem führt. Zur Lösung solcher Systems werden Methoden wie die „Least-Square-Methode“ oder „Closed-Form-Solutions“ verwendet, welche eine hohe Genauigkeit bei der Positionsbestimmung gewährleisten.
Wie kann man die Satellitennavigation für die Zeitsynchronisation nutzen?
Obwohl Satellitennavigationssysteme in erster Linie für die Positionsbestimmung konzipiert sind, dienen sie auch als hochpräzise Zeitreferenzen. Jeder GNSS-Satellit ist mit einer Atomuhr ausgestattet, was diese Systeme ideal für die globale Zeitsynchronisation macht. Jedes GNSS-Netzwerk arbeitet auf seiner eigenen Zeitbasis:
GPS Time (GPST)1)
- Referenzepoche: 6. Jänner 1980
- Zeitquelle: Atomuhren des U.S. Naval Observatory (USNO)
- Abweichung von UTC:
- GPST verzichtet auf Schaltsekunden und ist der UTC um 18 Sekunden voraus (Stand: 2025).
- Typische Abweichung von angepasster UTC: < 28 Nanosekunden (ns)
- GPST = UTC + 18 s ± 28 ns
GLONASS Time (GLONASST)2)3)
- Referenzepoche: 1. Jänner 1996
- Zeitquelle: Russischer GLONASS Central Synchronizer
- Abweichung von UTC:
- GLONASST inkludiert Schaltsekunden, läuft aber 3 Stunden vor UTC (angeglichen an die Moskauer Standardzeit, MSK).
- Typische Abweichung von MSK: <120 ns
- GLONASST = UTC + 3 h ± 120 ns
Galileo System Time (GST)4)
- Referenzepoche: 21. August 1999
- Zeitquelle: Galileo Control Centre – ESA-Atomuhren
- Abweichung von UTC:
- GST verzichtet auf Schaltsekunden und ist UTC 18 Sekunden voraus (Stand: 2025).
- Typische Abweichung von angepasster UTC: <30 ns
- GST = UTC + 18 s ± 30 ns
BeiDou Time (BDT)5)
- Referenzepoche: 1. Jänner 2006
- Zeitquelle: BeiDou Control Center
- Abweichung von UTC:
- BDT verzichtet auf Schaltsekunden und ist der UTC um 4 Sekunden voraus (Stand 2025).
- Typische Abweichung von angepasster UTC: <50 ns
- BDT = UTC + 4 s ± 50 ns
Für einen detaillierten Vergleich der GNSS-Zeitsysteme und ihrer Offsets siehe Sesia et al., 2021.
Welche GNSS-Lösungen gibt es bei DEWETRON?
Für die präzise Synchronisation von Messsystemen ist die Minimierung der relativen Zeitverzögerung zwischen verschiedenen Messgeräten von besonderer Bedeutung. Aufgrund ihrer Zuverlässigkeit und Einfachheit wird typischerweise die kabelbasierte Synchronisation bevorzugt. Direkte Kabelverbindungen sind jedoch nicht immer realisierbar – insbesondere bei großflächigen Anwendungen wie der Überwachung von Photovoltaikanlagen, die sich über mehrere Quadratkilometer erstrecken können. In solchen Fällen bietet die satellitengestützte Synchronisation eine ideale Lösung.

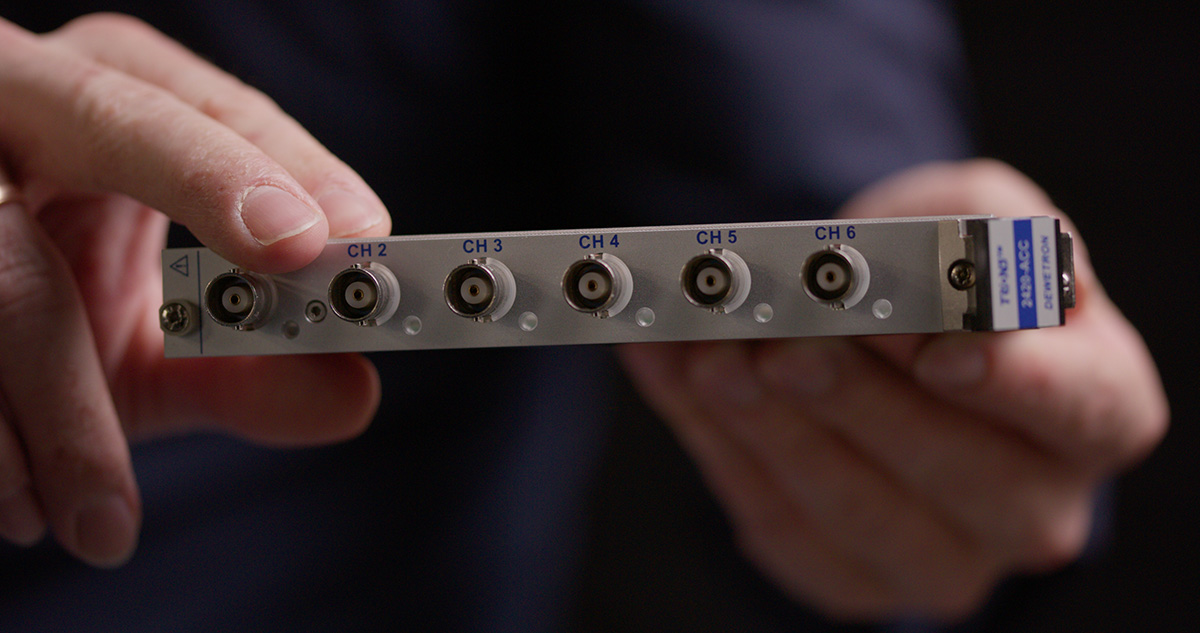
Abb. 2: DEWETRON Hardware für den Empfang von GNSS-Signalen
DEWETRON bietet mehrere Optionen für die satellitenbasierte Systemsynchronisation. Mit Hardware-Lösungen wie der Option, TRION-Timing Modulen oder TRION-VGPS Modulen ermöglichen wir den Empfang verschiedener GNSS-Signale. Die Wahl der Hardware bestimmt die exakte Synchronisationsgenauigkeit, welche jedoch immer besser als ±240 ns ist. Neben der Zeitsynchronisation unterstützen unsere Systeme auch die satellitengestützte Positionsbestimmung mit einer Genauigkeit von bis zu wenigen Metern. Diese Fähigkeit ist besonders wertvoll für Anwendungen in der Automobilindustrie, wie z. B. Tests von Fahrerassistenzsystemen (Advanced Driver Assistance System, ADAS), Straßentests für Onboard-Systeme, Bremstests und vieles mehr. Die folgende Tabelle gibt einen Überblick über unsere verfügbaren GNSS-Optionen:
| GPS | Galileo | BeiDou | GLONASS | Sync-Genauigkeit | Positionsgenauigkeit | |
| Chassis Controller | ✓ | x | ✓ | ✓ | ±100 ns | <2,5 m |
| TRION-TIMING | ✓ | ✓ | ✓ | ✓ | ±100 ns | <1,5 m |
| TRION-VGPS | ✓ | x | x | ✓ | ±240 ns | <1,5 m |
Tab. 1: Hardwarevergleich von DEWETRONs GNSS Lösungen.
Hinweis: Die Auswahl der richtigen Antenne ist ebenfalls entscheidend, da nicht alle Antennen jedes GNSS Signal empfangen können.
In Kombination mit DEWETRON’s Messsoftware OXYGEN ergeben sich eine Vielzahl von Anwendungsmöglichkeiten. Das Bird’s Eye Plugin zum Beispiel bietet eine Echtzeit-Visualisierung für ADAS-Tests und nutzt IMU-Daten, um die Position und Bewegung von Objekten zu aktualisieren. Dies ermöglicht die Erstellung realistischer Konturen für präzise Entfernungsberechnungen. Ein weiteres nützliches Tool ist das GPS-Plot-Instrument mit seiner Color-Trail-Funktion, die es ermöglicht, GPS-Routen in Abhängigkeit von der Amplitude eines bestimmten Kanals (z. B. Geschwindigkeit, Beschleunigung, Höhe…) farblich zu verändern.
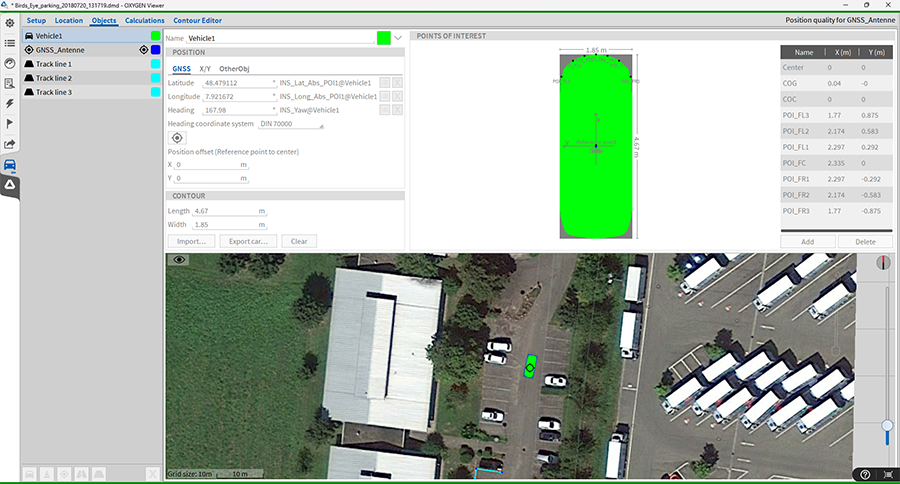
Abb. 3: OXYGEN’s Bird Eye Plugin (links) und GPS-Plot Instrument (rechts)
DEWETRONs GNSS Lösungen kombinieren hochpräzise Gerätesynchronisation, genaue Positionsbestimmung und moderne Visualisierungswerkzeuge, um die Anforderungen moderner Messanwendungen zu erfüllen. Ob für Automobil-Tests oder für die Überwachung großer Systeme, unsere Technologie garantiert eine zuverlässige und effiziente Arbeitsweise.
Langer Rede kurzer Sinn
Globale Navigationssatellitensysteme (GNSS) wie GPS, GLONASS, BeiDou und Galileo haben die Art und Weise revolutioniert, wie wir weltweit Standort und Zeit bestimmen. Diese Systeme werden zwar in erster Linie für die Navigation eingesetzt, spielen aber auch eine wichtige Rolle bei der präzisen Zeitsynchronisation – eine wesentliche Voraussetzung für viele industrielle und wissenschaftliche Anwendungen. Jedes GNSS arbeitet auf seiner eigenen Zeitbasis, wobei hochpräzise Atomuhren eine Synchronisationsgenauigkeit von bis zu wenigen Nanosekunden gewährleisten. Moderne Empfänger können die Signale von mehreren Systemen kombinieren, was die Genauigkeit und Abdeckung erheblich verbessert.
DEWETRON setzt die GNSS-Technologie ein, um eine hochgenaue Zeit- und Positionsbestimmung für seine Datenerfassungssysteme zu gewährleisten. Mit Lösungen wie dem Chassis Controller, TRION-TIMING und TRION-VGPS Modulen können Sie eine Synchronisation < ±240 ns und eine Positionsgenauigkeit von nur wenigen Metern erreichen. Kombiniert mit DEWETRONs OXYGEN Software sind diese Systeme perfekt geeignet für anspruchsvolle Anwendungen wie präzise Lokalisierung und synchrone Datenerfassung über große Flächen.
Quellen
- http://www.gps.gov/technical/icwg/IS-GPS-200G.pdf
- https://ieeexplore.ieee.org/document/6928996
- https://www.ursi.org/proceedings/procGA14/papers/ursi_paper1409.pdf
- https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo-OS-SDD_v1.3.pdf
- http://en.beidou.gov.cn/SYSTEMS/ICD/